Depuis quelques temps, plusieurs posts ont été consacrés à la cobotique et aux exosquelettes. L'ENSC s'intéresse à ces domaines appliqués à l'industrie, notamment avec des thèses Cifre avec le groupe Safran (2 thèses avec Herakles et 1 avec Aircelle). L'équipement programmé de l'école permettra d'ailleurs de former concrètement tous les élèves ingénieurs à la problématique.
La première vocation de la cobotique et particulièrement de l'exosquelette est d'augmenter les capacités et la performance de l'homme. Or l'hypothèse première est jusqu'ici consacrée à la force ou l'amplitude et la précision du mouvement ou du geste ainsi artificiellement augmentés.
L'équipe de robotique du laboratoire d'Arbeloff du MIT à Boston à exploré une autre piste qui nous paraît fort intéressante. Plutôt que de s'intéresser à l'augmentation de la performance des membres de l'utilisateur, les chercheurs ont opté pour une augmentation quantitative. Ils ont donc imaginé une prothèse robotique qui, une fois portée, permet à son utilisateur de bénéficier d’un ou deux prolongements supplémentaires : la problématique de "Shiva" ou celle de la pieuvre si l'on préfère.
Ce type de squelette artificiel complémentaire se nomme SRL (pour supernumerary robotic limbs), et sont des prothèses robotiques qui, lorsqu'elle sont portées, offrent un ou plusieurs membres de plus que d’ordinaire.
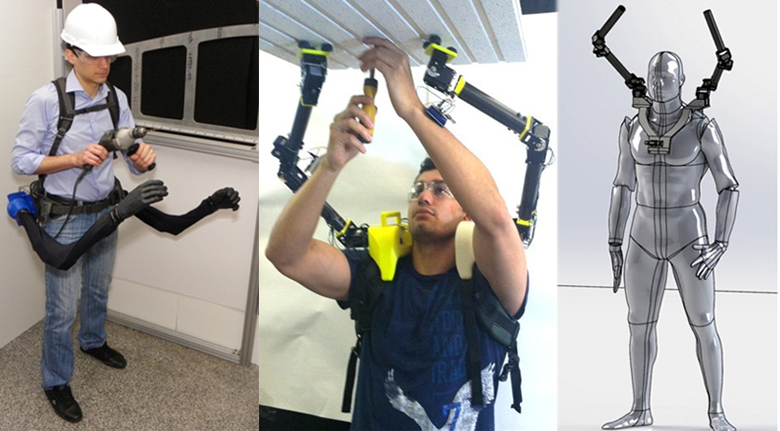
Pour l'instant, l'appareillage n'est pas contrôlé par une interface BCI (cerveau-machine) ou par des capteurs EMG (activité myo-électrique), ce qui devrait être une piste de développement à privilégier. Par exemple, et c'est très intéressant, l’appareil dispose d'une capacité d'intelligence artificielle lui permettant d’apprendre à partir des mouvements du corps de la personne qui le porte en fonction de la tâche à faire. Ainsi, cet exosquelette permet par exemple d’ouvrir des portes laissant à son utilisateur les mains libres, pour porter des charges légères, fragiles ou pour utiliser un ordinateur portable.
Le développement IA Les chercheurs travaillent sur le développement d'algorithmes d'apprentissage de routines permettant, par exemple l’utilisation de certains outils ou la systématisation de certains comportements opératoires précis. Le but est, à terme, d'obtenir un exosquelette compagnon, qui servira à porter des objets, manipuler des éléments toxiques ou dangereux pour les mains des opérateurs, et soulager les tâches en proposant ou triant des outils pendant l’exécution d’une tâche de manipulation naturelle.
On voit ainsi une nouvelle application de la vocation de convergence entre différents domaines technologiques, la robotique et l'IA, et les sciences du comportement naturel, telles que l'ethnologie humaine, la bio mécanique et l'ergonomie en situation complexe.
Voir une vidéo du MiT (ici).
Voir une vidéo du MiT (ici).
http://dailygeekshow.com/wp-content/uploads/2014/08/robot-carton.jpg
Aucun commentaire:
Enregistrer un commentaire